|
|
|
インドアプレーンインドアプレーン製作 近所のパソコン屋でジャンク扱いになってたリチウムポリマー電池(100円)を大人買いしてきました.  端子は合う物を持ってないので引きちぎりました.  手持ち(小さいのはこれしかない)のモータを回してみましたが,バッテリーを乗せて飛べるとは思えません. 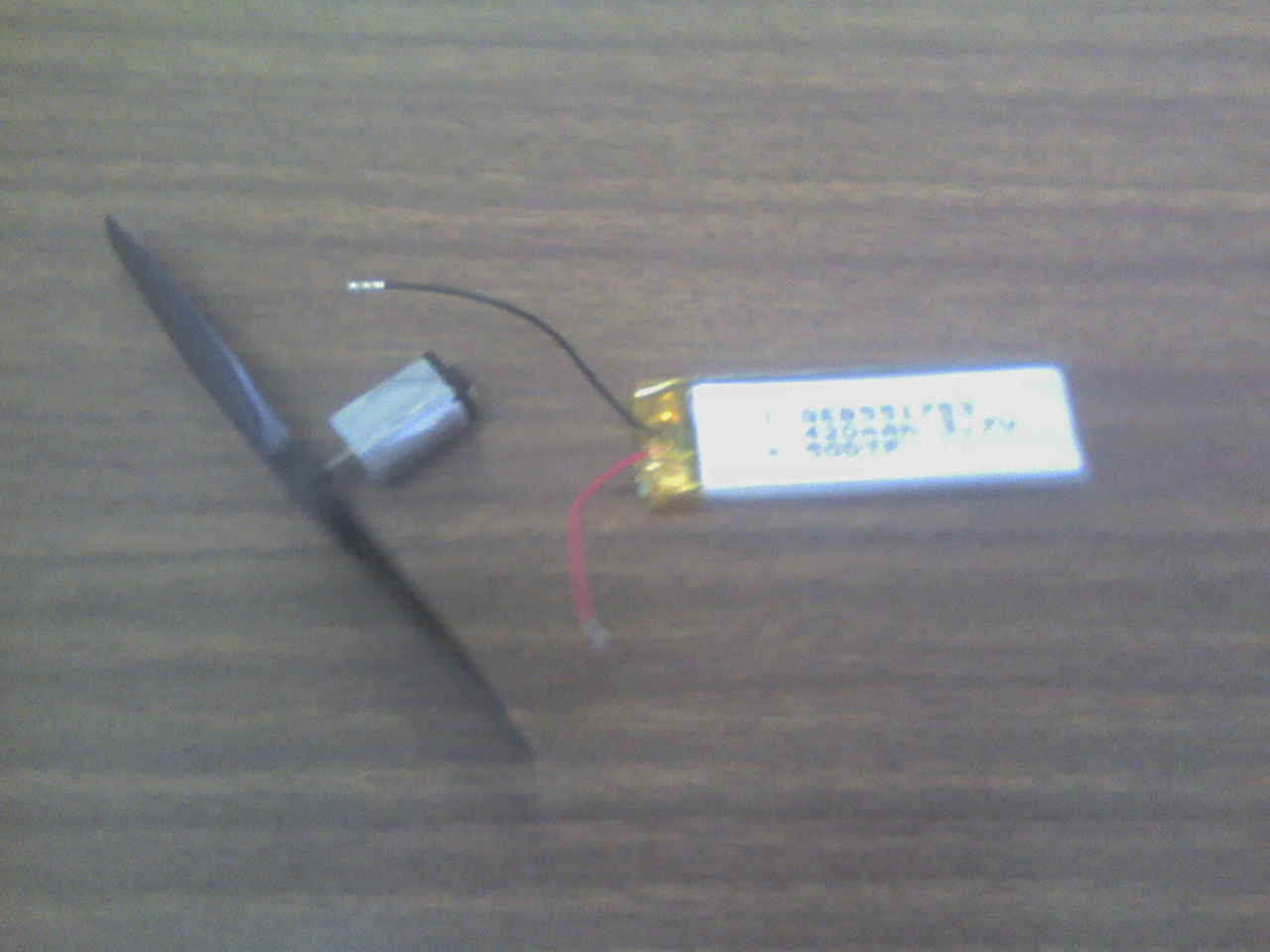 ほかに持ってるのはパークプレーン用のギヤダウンユニットで,これは大きすぎ.  PICマイコンを使って,赤外線送受信を作りました. 詳細はフリーページの, 赤外線送受信(アナログ)へ. こんな感じです↓  (最近買った,画像保存機能付きデジタルオシロです.) 18ピンのPICで実験しましたが,8ピンでも同じ考え方でできます. インドアプレーン用にPIC12F629用も作りました. 2-3日の作業で,インドアプレーンのパーツが揃ったことは揃ったのですが,以前作ってたパークプレーンの経験からすると,モータに対してリチウムポリマーバッテリーが大きすぎ(重すぎ). 機体を大きくして何とか浮かそうにも,PIC直結のマグネットアクチュエータではラダーが非力な感じです. とりあえず機体を作って乗せてみることにします. モータを回してみたところ↓ 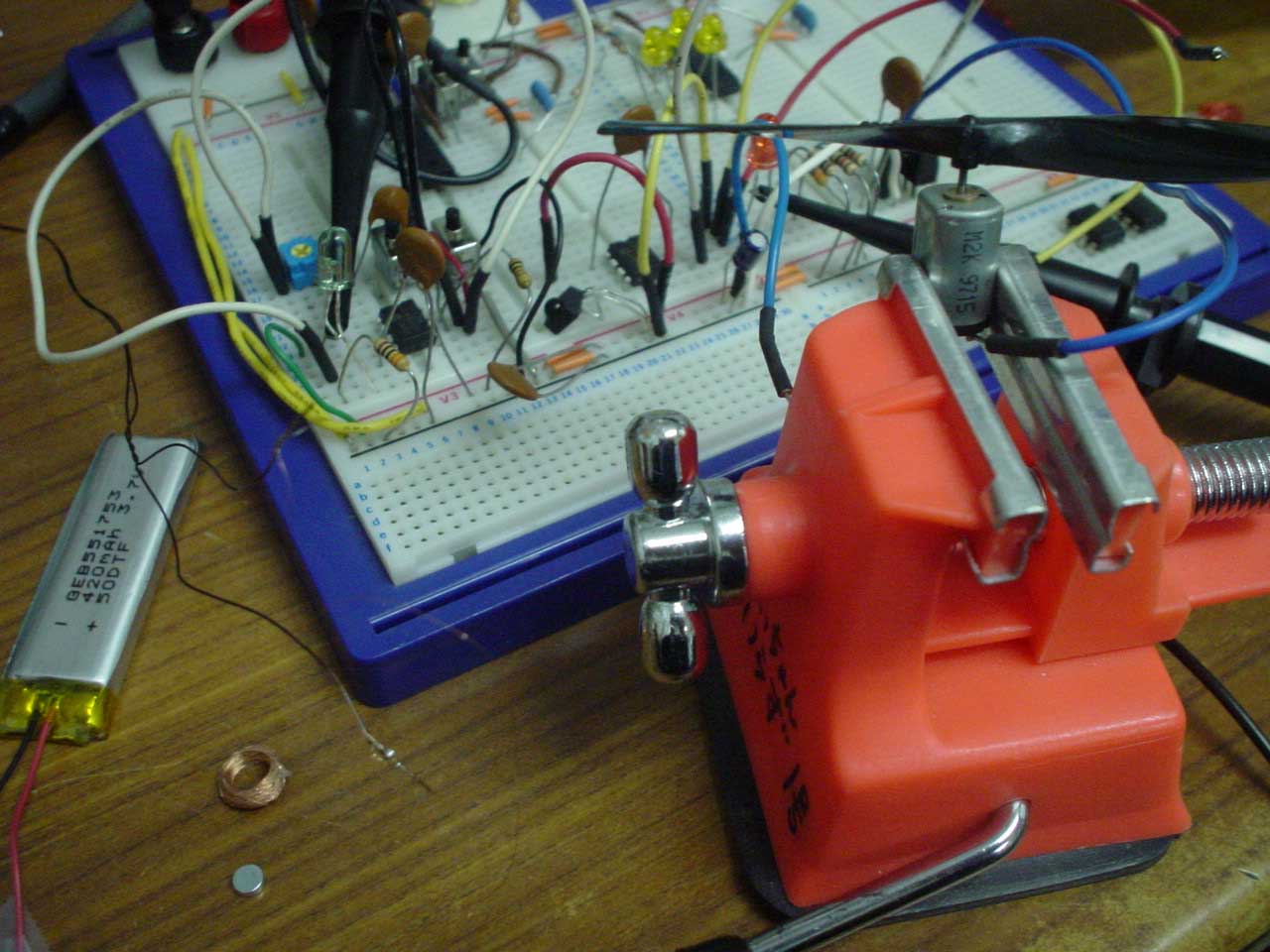 PWMによるモータ制御の動画 次の写真の左側が送信機,ボリュームを縦においてスピードコントロール. タクトスイッチで左右. 赤外線LEDは増設できるように配置をしました. 操作性に重点を置いて部品配置したので,裏はぐちゃぐちゃです. 右手に受信機とモータ,アクチュエータ.基板を使わず8pinDIPのPIC12F629に直付けです. 配線はテスト用に長めに付けいています.機体を作ったらそれにあわせて適当にカット. 重さはハカリが無いのでわかりませんが,気にしないでください. 1機目なので,とりあえず飛べばいいんです... 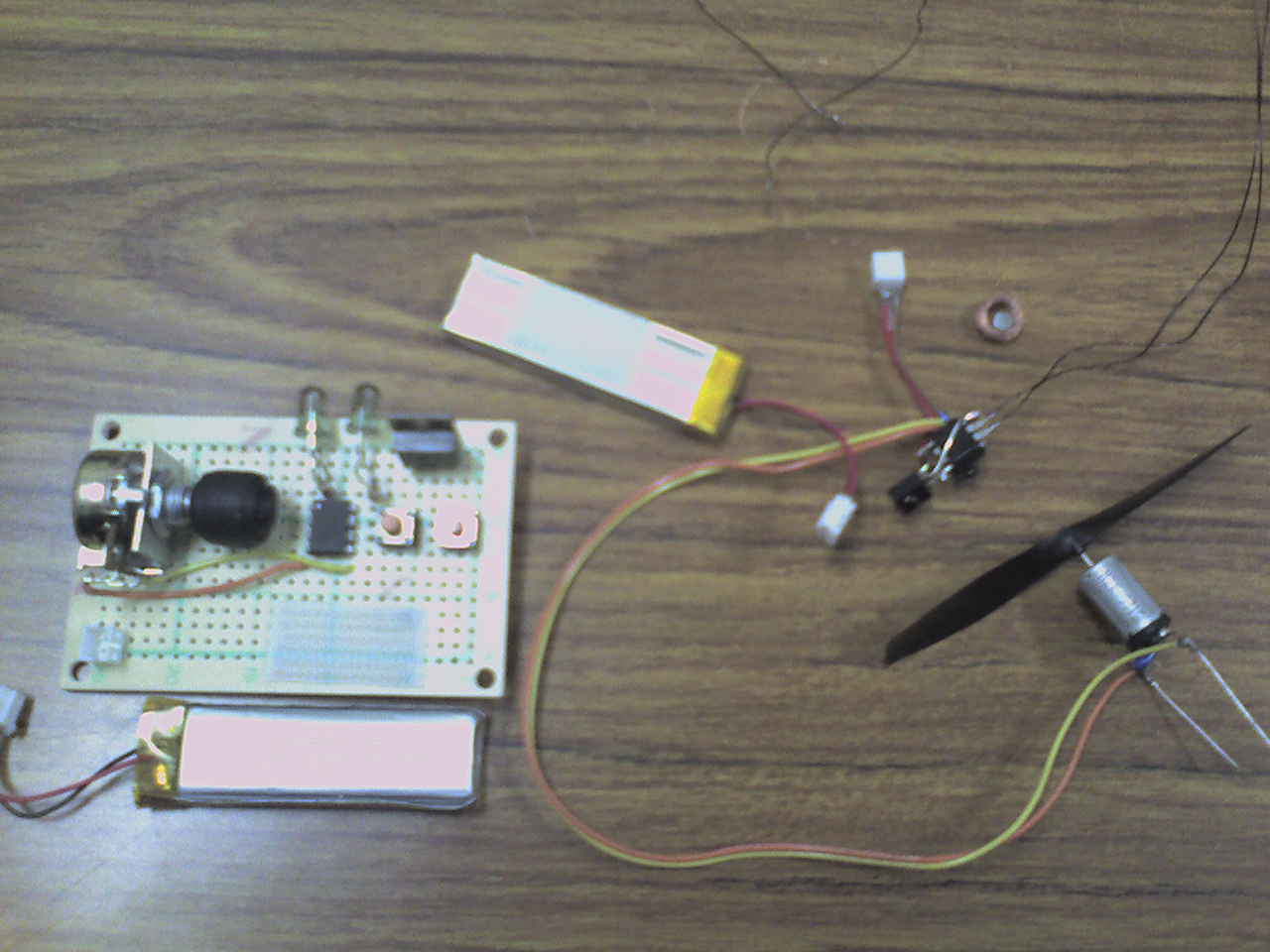 というわけで, インドアプレーンの形はできました. 飛ぶか? と聞かれれば飛びます.ただし・・・直進のみ. 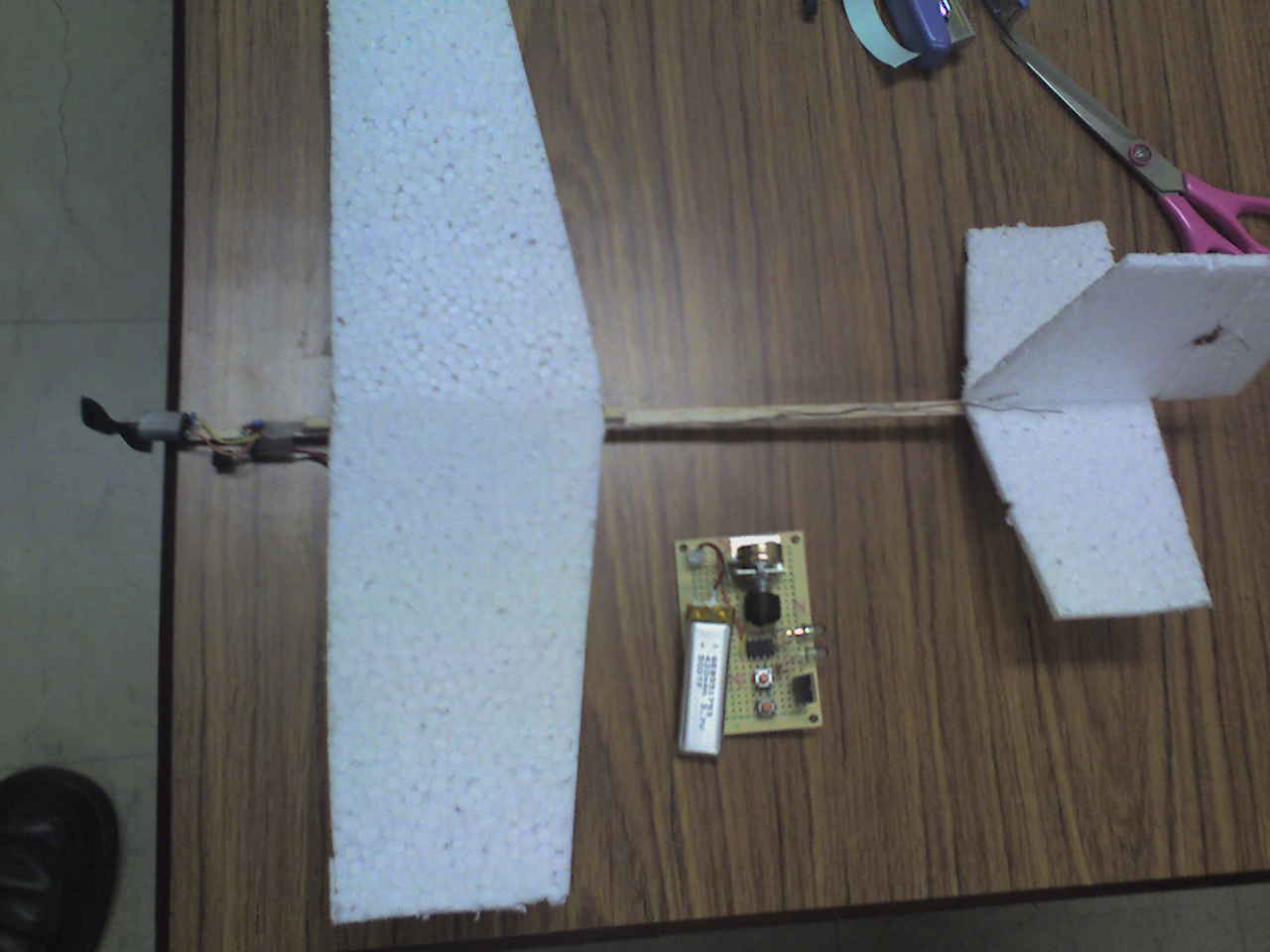  モータのパワーと重量にあわせた機体を作ったのですが,予測通りラダーが非力でまったく役に立ちません.手巻きで適当に作ったので巻き数が足りず,またHブリッジ回路を組むのが面倒で省いたため,トルクが無いです. あと,翼面荷重が大きく,速度があるので,赤外線の届かないところへ飛んでいってしまいます. また,コントローラのプログラムも悪く,ノイズに弱いです. 何をどうすれば飛ぶ機体になるかのイメージはつかめたのですが・・・ 次の急ぎの仕事が入ったので,インドアプレーンへの挑戦は中断します. やっぱり,手間とお金をかけてじっくり取り組まないと良いものはできませんね... ジャンル別一覧
人気のクチコミテーマ
|